Leave your contact details and our
consultant will contact you

The standard diagram of connecting a driver to a controller and a stepper motor to a driver looks quite simple.

We have a controller, stepper motor driver and stepper motor.
This whole circuit is designed so that the controller can control the stepper motor and can move the cutter to a certain state.
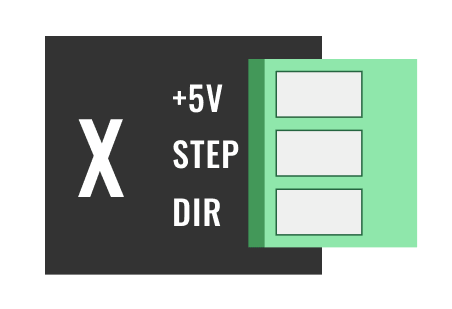
The controller controls the driver using 2 main signals: STEP and DIR.

STEP is for the controller to “tell” the driver how many steps to take.
DIR is intended for the controller to “tell” the driver in which direction to take steps (forward or backward).
Also, some controllers have the following connectors:
 The driver also have connectors:
The driver also have connectors:
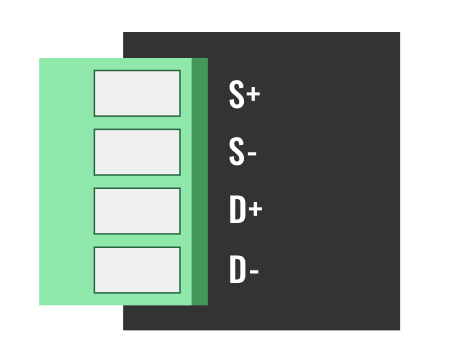
As a result, we need to connect:

Let's summarize. When you connect the driver to the controller, you definitely need to match the STEP of the controller to the STEP of the driver, the DIR of the controller to the DIR of the driver.
We figured out how to connect the controller to the driver.
Now let's analyze the connection of the driver to the motor.
The motor is connected to the driver most often with 4 contacts (sometimes 8 contacts).

These contacts are called: A +, A-, B +, B-.
In fact, this is a conventional unipolar stepper motor with 2 windings. On the diagrams, it is displayed as follows:

When the motor has 4 output wires (A +, A-, B +, B-), the question often arises “How to understand which of the wires is A +, A-, B +, B-”.
From the fact that you mix up the polarity, nothing terrible will happen. The motor will simply rotate in the other direction.
In the event that you are still confused, you simply connect the windings and check if it does not spin or does not spin there, change two wires in one winding in places, if again it is not so, then change two wires in the second winding.
Also, do not forget that the driver must be supplied with power to the main power port of the stepper motor.
How to set up dip switches from the link.